09. Building a P Controller
Programming a Proportional Controller
Now lets get started and talk about the goal of this quiz and what your expected results are to look like!
In the following quiz we will be building a proportional controller for regulating the altitude of a quadrotor. You will need to follow along with the interactive comments in the code in order to build out the controller.
You want to shoot to have your output look like so:
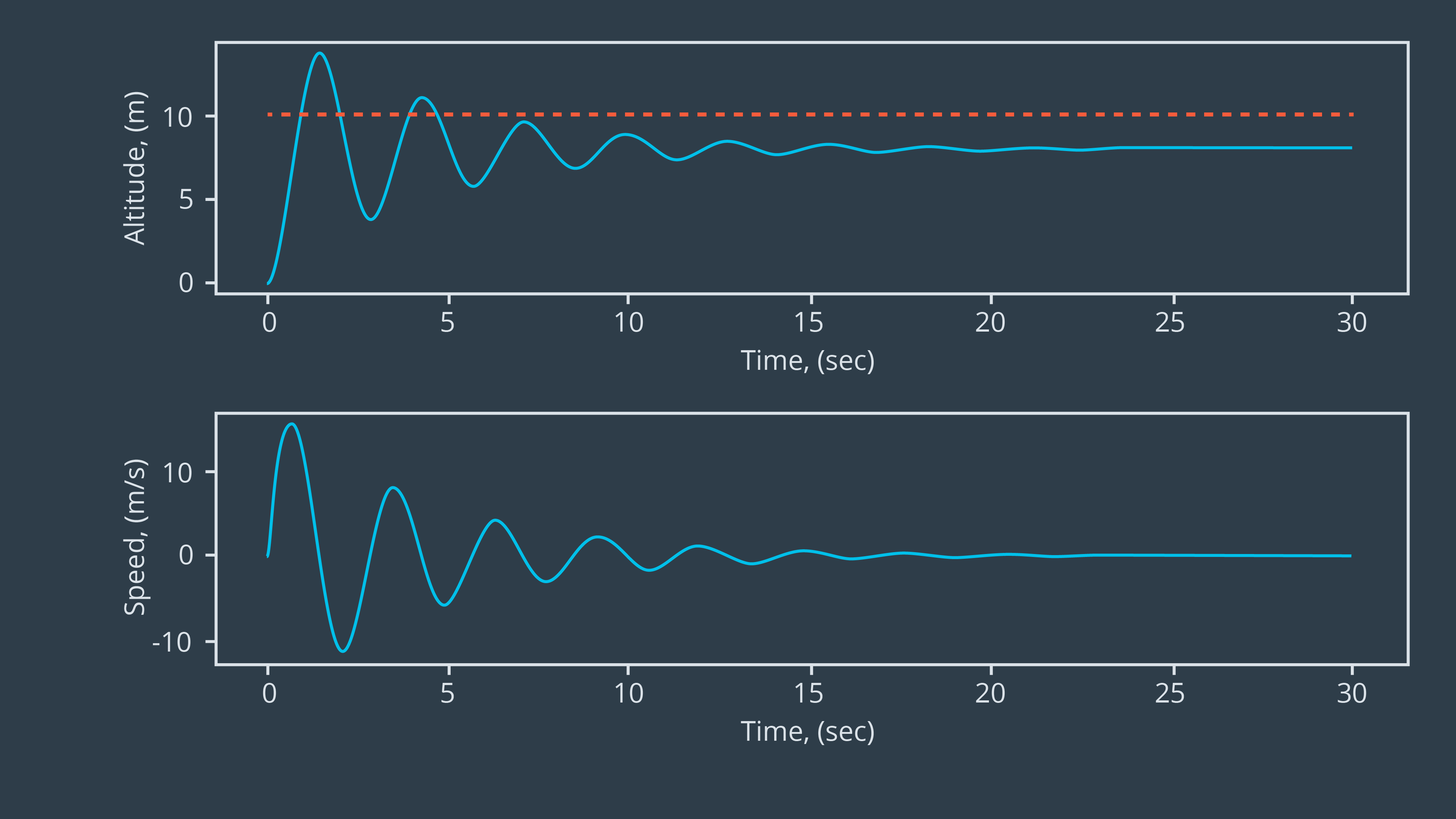
Where you can see that we are oscillating closer to the set point.
Be sure to spend sometime playing around with Kp (the proportional constant) and see its effects one the altitude controller.
Ask your self the questions:
- What happens when Kp is large?
- What happens when Kp is small?
- Do we reach our desired goal?
- How does control effort vary with different Kp values?
- How does the steady state offset and overshoot vary with different Kp values?
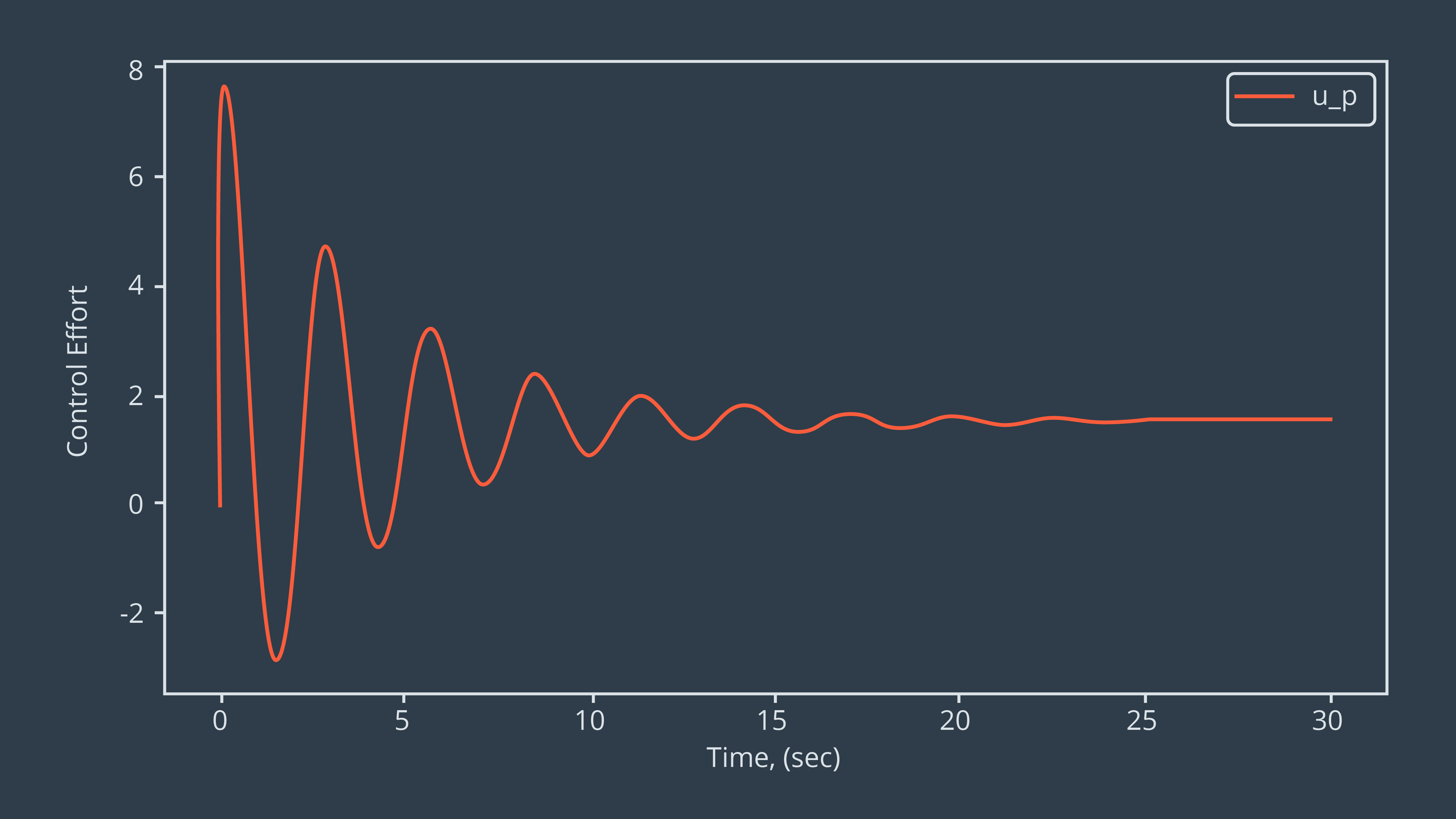
You can see below the desired control effort for this controller. Does it look efficient?
Keep these questions in mind as we progress through these quizzes and observe the positive and negative aspects of having or not having various controller components.
Final Notes
As a final note, you will be working controller from a proportional controller all the way up to an advanced PID controller in order to create the script that you will be using in your exercise. So be sure to get comfortable with the code base your building upon and try to understand everything that is happening!
Good luck!
Start Quiz:
Reflect
QUESTION:
Take some time after you have played with the code above to reflect on these questions:
- What happens when Kp is large?
- What happens when Kp is small?
- Do we reach our desired goal?
- How does control effort vary with different Kp values?
- How does the steady state offset and overshoot vary with different Kp values?
ANSWER:
There is no desired answer to this question but hopefully taking time to reflect on these questions will give you a deeper understanding of the proportional "knob"!
Quick check!
SOLUTION:
- Increase